Neurophysiologist. Canadian-born, trained in medicine/research (MD background) and became a leading experimental neuroscientist. Spent most of his career at Harvard Medical School (Department of Neurobiology), working on visual processing in cats and monkeys.
Torsten N. Wiesel (b. 1924):
Neurophysiologist. Swedish-born, medically trained (MD background) and specialized in sensory neurophysiology. Also based at Harvard Medical School during the classic visual cortex work with Hubel.
Together they ran landmark experiments on the cat’s visual cortex (V1), and they received the 1981 Nobel Prize in Physiology or Medicine (shared) for discoveries about information processing in the visual system
Architecture of visual cortex of the cat
David Hubel
Torsten Wiesel
Hubel and Wiesel: Cat’s visual cortex
Recorded from cells in cat V1
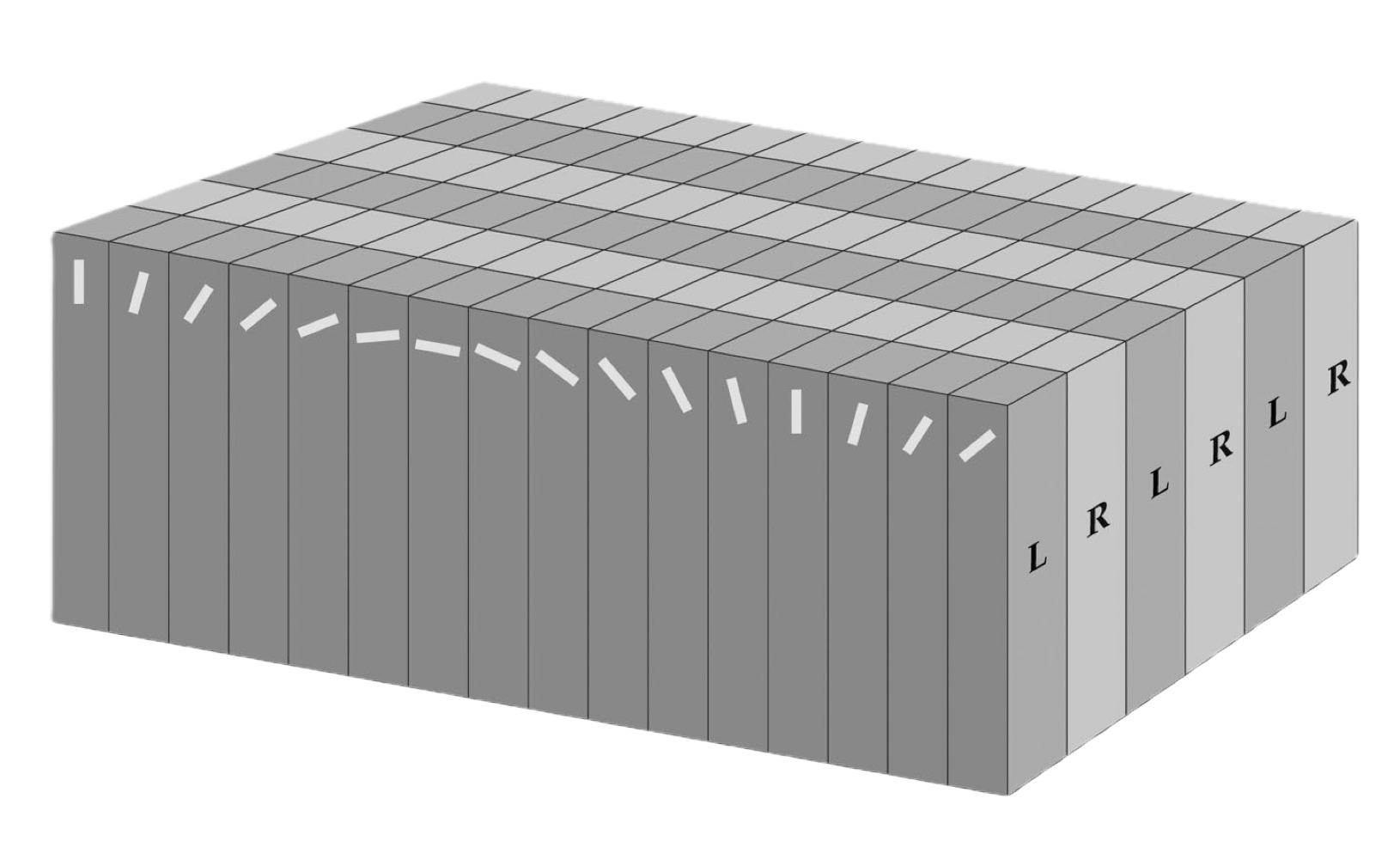
Cortex organization
functional architecture of simple cells and complex cells in the early visual cortex
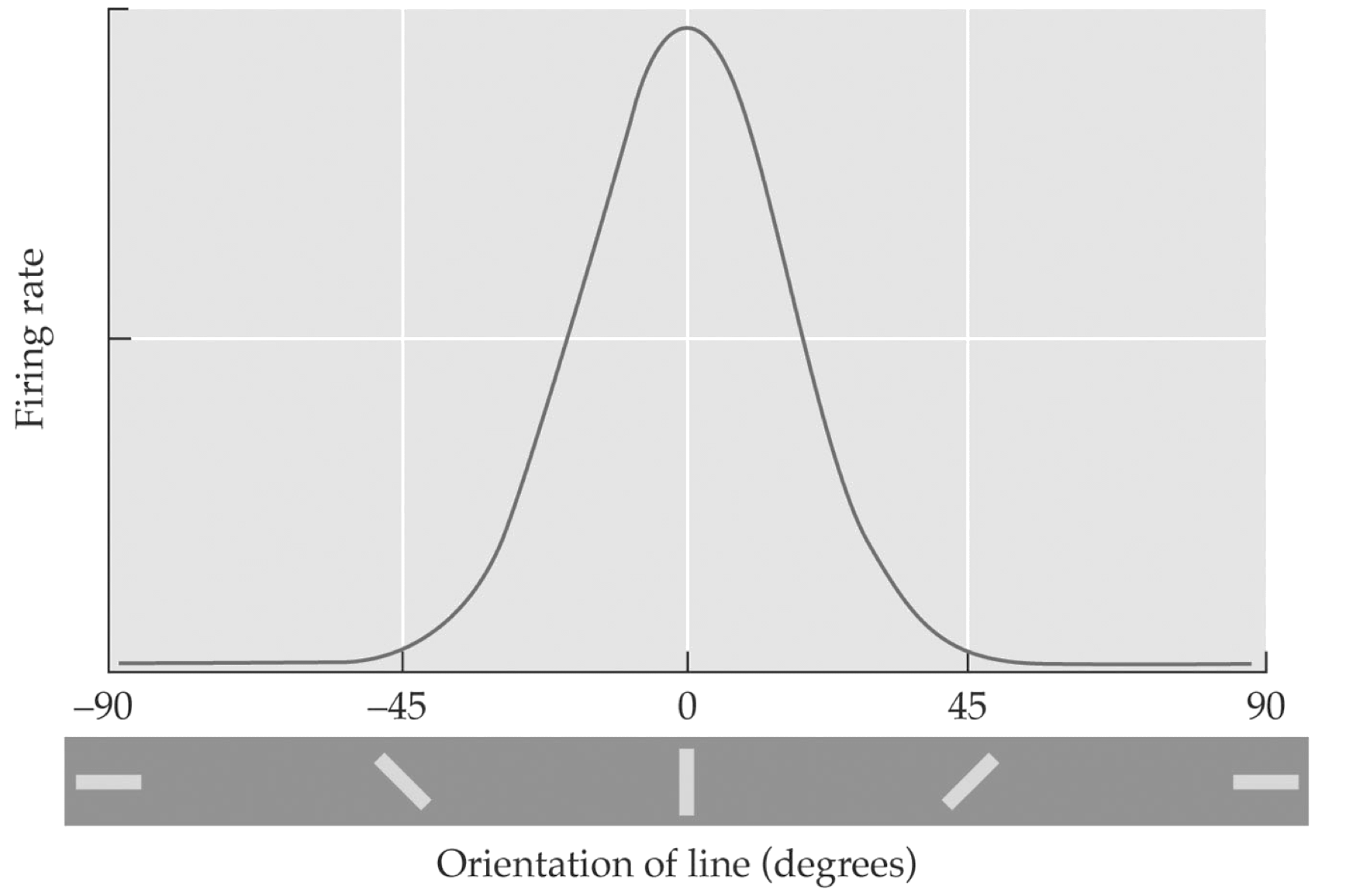
Orientation matters
Orientation Tuning Function of a Cortical Cell
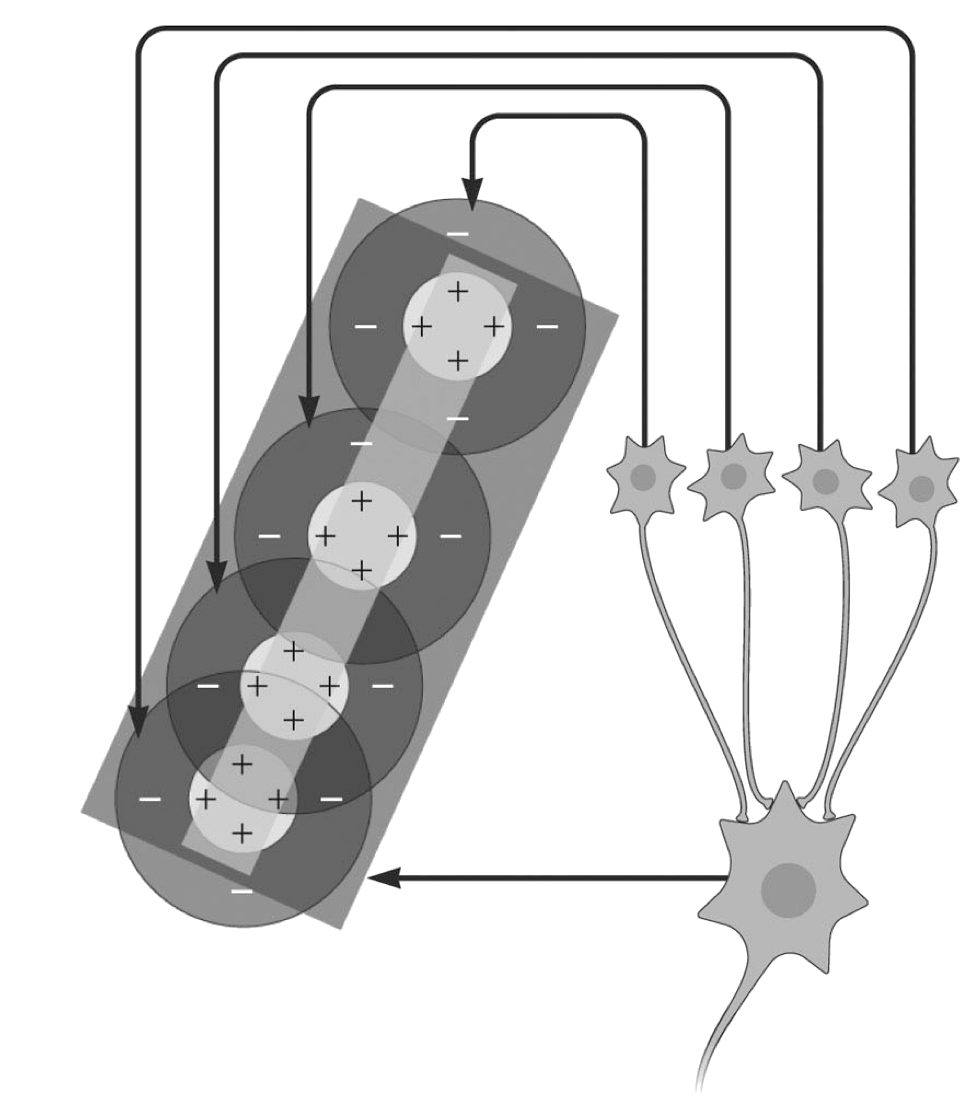
Receptive fields
Receptive Fields in Striate Cortex
A receptive field is the region of the visual field where a stimulus will change the firing rate of a neuron
Receptive fields in V1 are small and retinotopic (map the visual field)
Tend to grow in size with eccentricity, and become more complex through hierarchical pooling of earlier inputs
V1 neurons respond best to specific local features, especially oriented edges/bars, at a particular location, orientation, spatial frequency, and often motion direction
Receptive fields
Receptive Fields in Striate Cortex
orientation column:
vertical arrangement of neurons – systematic, progressive change in preferred orientation; all orientations were encountered in a distance of about 0.5 mm
hypercolumn:
1-mm block of striate cortex containing:
all the machinery necessary to look after everything the striate cortex is responsible for, in a certain small part of the visual world (Hubel, 1982)
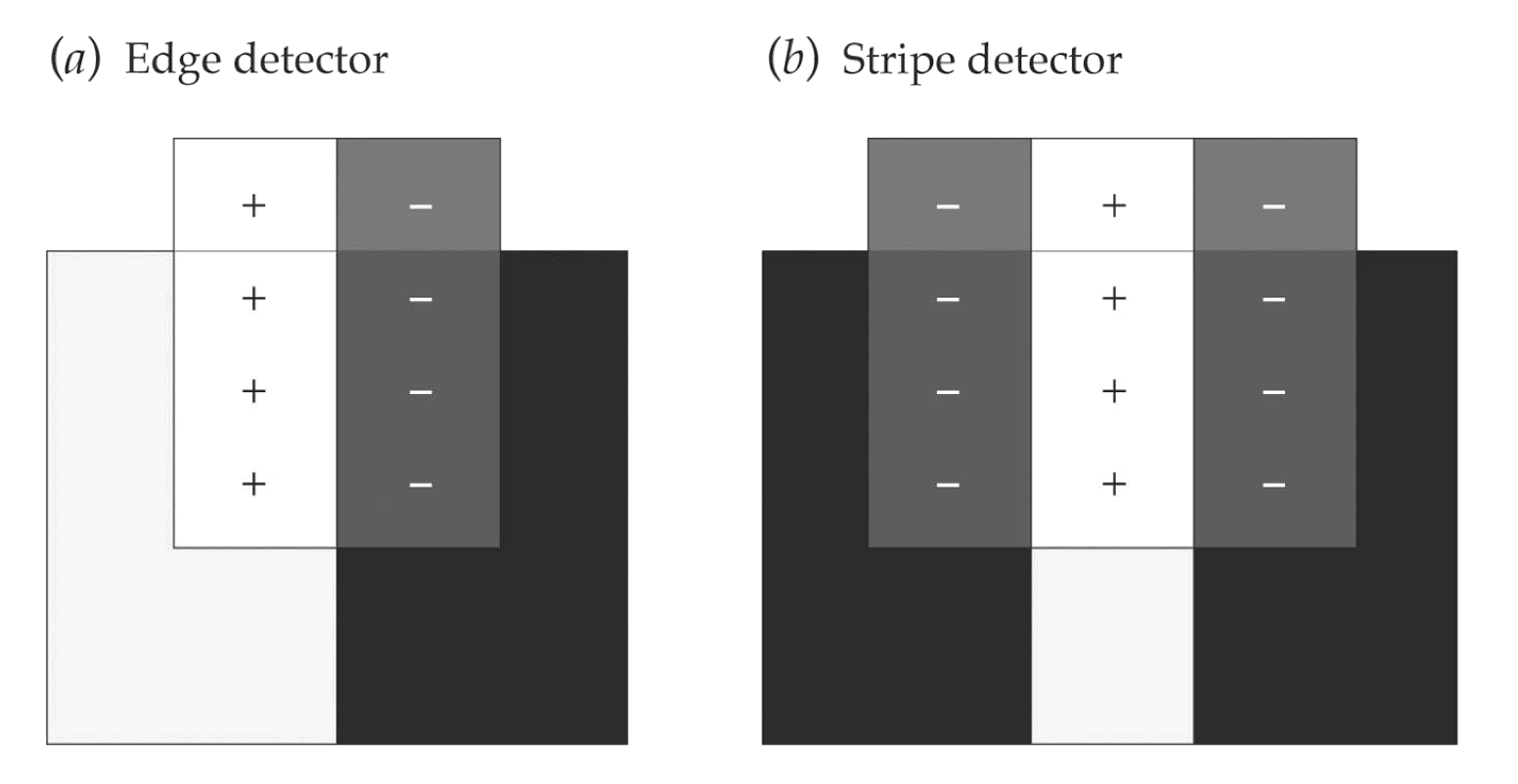
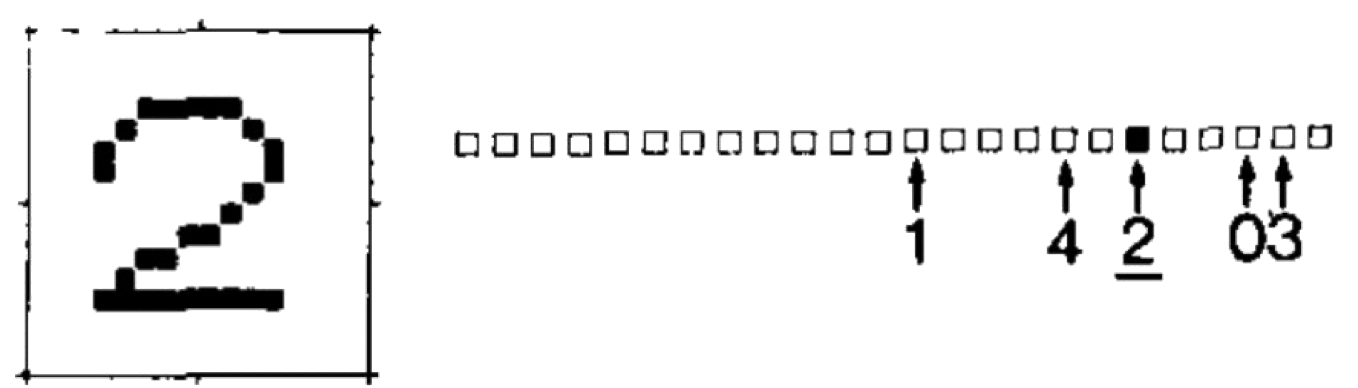
Feature detectors
edge end stripe detectors
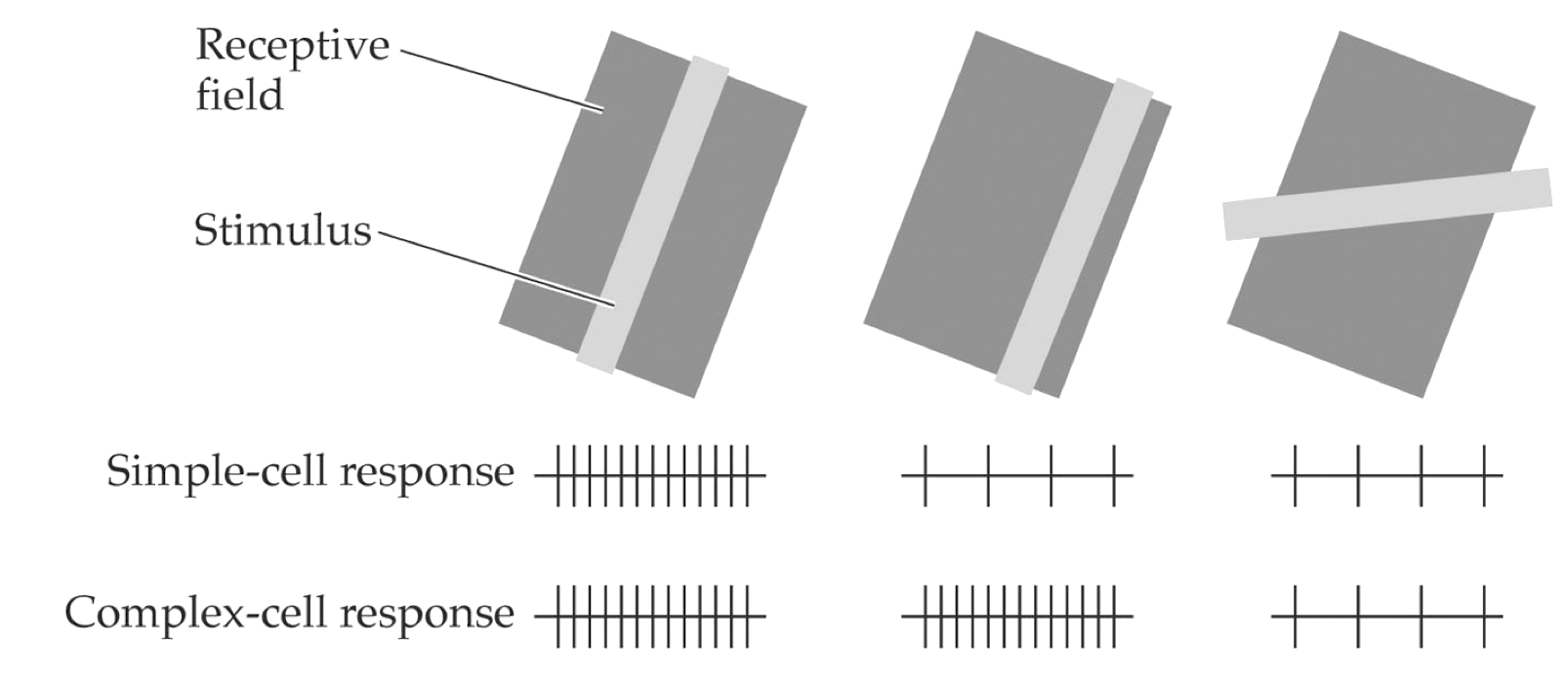
Feature detectors
receptive fields vs stimulus
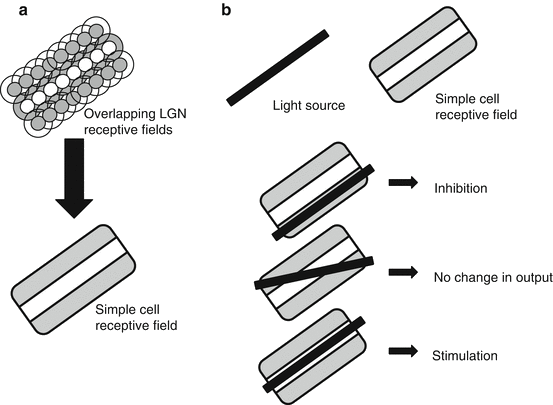
Feature detectors
receptive fields vs stimulus (from Ento Key)
Main findings (V1 / striate cortex)
Feature-selective receptive fields: many V1 neurons respond best to oriented edges/bars (not spots).
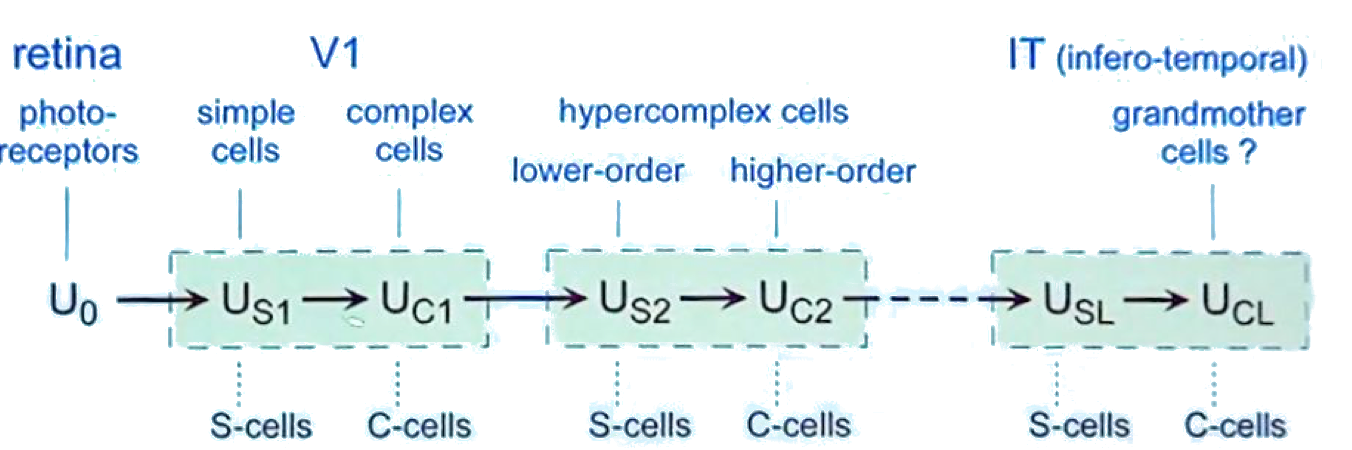
Cell types:
Simple cells: distinct ON/OFF subregions; tuned to position + orientation.
Complex cells: orientation-selective but more position-invariant; often direction selective.
Hierarchical building blocks: more complex tuning can be explained by pooling simpler inputs (LGN1 -> simple -> complex).
A convolution (denoted by \(*\)) is an operation on two functions \(f\) and \(k\) that produces a third function \((f * k)\).
In machine learning:
\(f\) is the input
\(k\) is a kernel
output is a feature map
A convolutional neural network (CNN) uses convolution in place of general matrix multiplication in at least one layer. (Goodfellow, Bengio, and Courville 2016) It’s main purpose is not dimensionality reduction but feature extraction.
In CNNs, \(f\) is typically a tensor (e.g., height \(\times\) width \(\times\) channels), and \(k\) is learned.
Convolution properties
Commutativity (but…)
Mathematically (under standard conditions):
\[(f * k) = (k * f)\]
But: many deep-learning libraries implement cross-correlation:
\[(f \star k)[n] = \sum_m f[m]\,k[n+m]\]
Cross-correlation differs from convolution by a flip of the kernel index. CNNs still learn filters effectively, but the strict commutativity property doesn’t directly apply to the implemented operator.
Convolution properties
Linearity (superposition)
Convolution is linear in each argument:
\((a f_1 + b f_2) * k = a(f_1 * k) + b(f_2 * k)\)
\(f * (a k_1 + b k_2) = a(f * k_1) + b(f * k_2)\)
This is one reason convolutions pair naturally with linear algebra operations in neural nets: they preserve additivity and scaling.
Convolution properties
Associativity (stacking filters)
Convolution is associative:
\[ (f * k_1) * k_2 = f * (k_1 * k_2) \]
Interpretation for CNNs:
If you stack linear convolution layers without nonlinearities, the result is equivalent to a single convolution with an “effective kernel” \(k_{\text{eff}} = k_1 * k_2\).
In practice, CNNs insert nonlinearities (ReLU, GELU, etc.), so depth adds expressive power beyond a single convolution.
Convolutions properties
Distributive property:
\[ f * (k_1 + k_2) = (f * k_1) + (f * k_2) \]
Identity element: the (Dirac/Kronecker) delta acts like “do nothing”.
Continuous: \(f * \delta = f\)
Discrete: \(f[n] * \delta[n] = f[n]\) where \(\delta[0]=1\), \(\delta[n\neq 0]=0\)
In CNN terms, an “identity-like” kernel (e.g., a 2D kernel with a 1 in the center and 0 elsewhere) passes features through unchanged.
Convolution in space/time becomes multiplication in frequency.
\(k\) acts like a frequency response (low-pass, high-pass, band-pass).
Practical CNN angle:
Some large-kernel convolutions can be computed faster via FFT-based methods, though many modern CNNs rely on highly optimized spatial-domain kernels on GPUs.
Convolutions properties
Separable, dilated, strided, and padded convolutions
Separable kernels: if \(k(x,y)=a(x)b(y)\), then:
\[ f * k = (f * a) * b \]
This can reduce compute (used in depthwise-separable convolutions). (we will see more about this later)
Dilation: increases receptive field without increasing parameters.
Stride: samples the output every \(s\) steps (downsampling).
Padding: controls boundary behavior and output size (“same” vs “valid”).
These variants change how the convolution is applied, but they build on the same core operator.
Convolution properties
Backprop: gradients are (cross-)convolutions too
For a loss \(L\) and output \(y = f * k\), the gradients have convolution structure:
Gradient w.r.t. input resembles convolution of upstream gradient with a flipped kernel.
Gradient w.r.t. kernel resembles convolution (or correlation) between the input and upstream gradient.
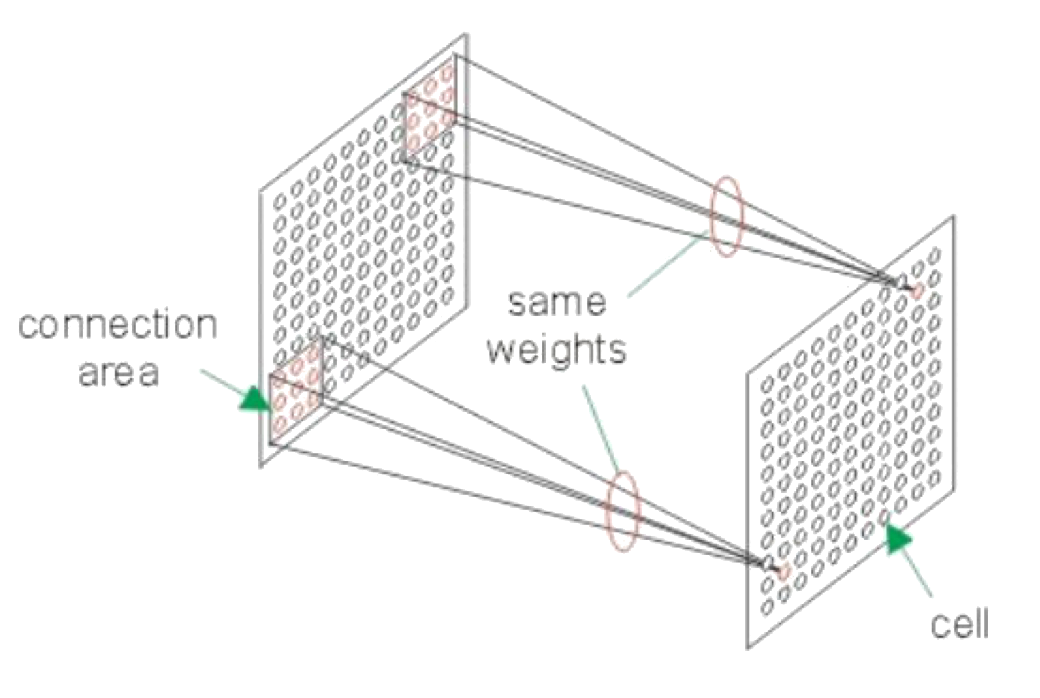
Parameter sharing: one kernel is reused across positions.
Local connectivity: kernels are small relative to the input.
Receptive field growth: stacking layers increases the region of input each output depends on.
Conv 2D
A 2D convolution (Wikimedia)
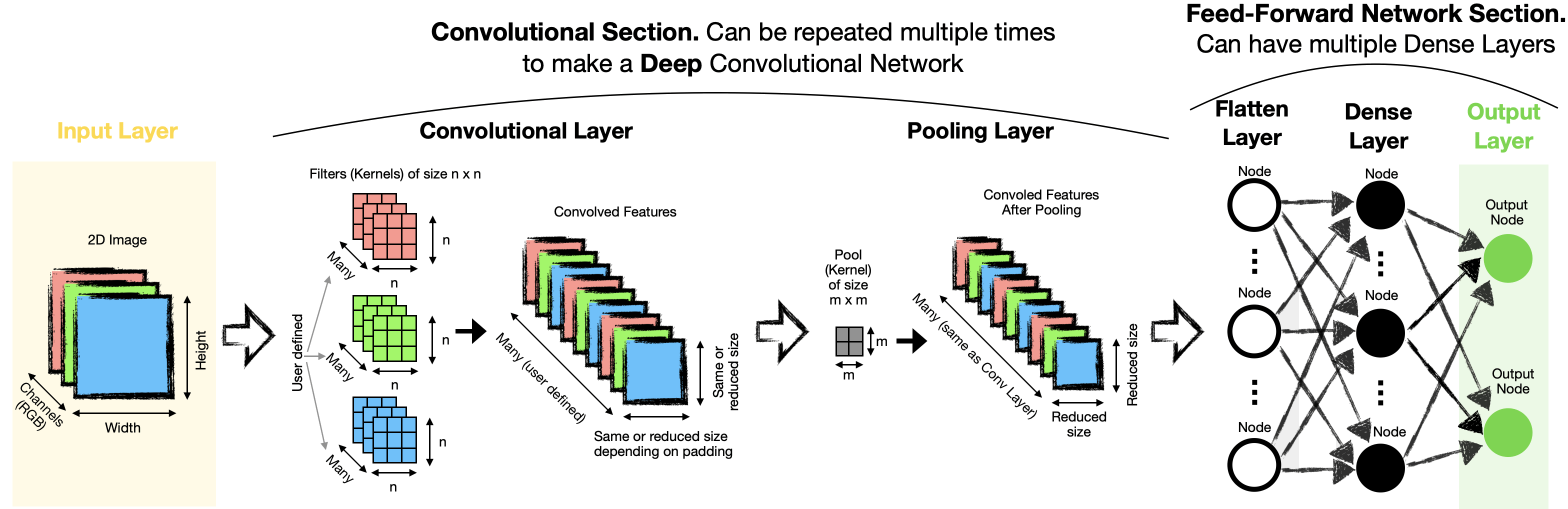
Basic CNN Structure
Three components
channels
strides
padding
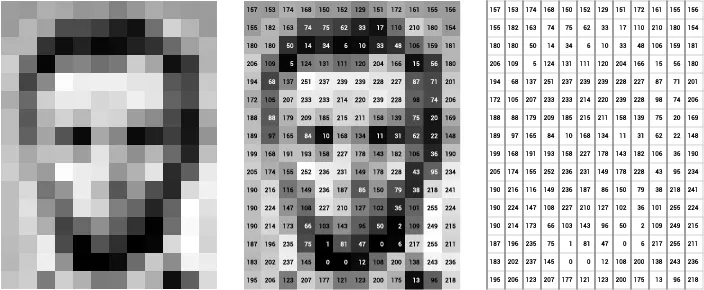
Channels
In color images, pixels intensity are represented a tensori RGB image are formed from the corresponding pixel of the three component
Channels
In color images, pixels intensity are represented a tensori RGB image are formed from the corresponding pixel of the three component
Channels
A convolution layer applies multiple kernels (filters) to the input.
Each kernel produces one output channel, also called a feature map.
The layer’s depth (number of output channels) equals the number of kernels in that layer.
The full output of the layer is the stack of all feature maps
The shape: (\(H_{out}\), \(W_{out}\), \(K\)) where .
(\(H_{out}\)) = the height (number of rows) of each feature map after the convolution
(\(W_{out}\)) = the width (number of columns) of each feature map after the convolution
(\(K\)) = the number of feature maps, i.e., the number of kernels/filters in the layer So you can think of it as (K) separate 2D images, each of size (H\(_{out} \times W_{out}\)), stacked along the “channel” dimension.
Example: if a layer outputs (\(H_{out}\)=32), (\(W_{out}\)=32), and you use (\(K=64\)) filters, the output shape is (32, 32, 64): 64 feature maps, each 32×32.
Strides
Stride = step size of the kernel as it slides across the input.
If S = 1, the kernel moves 1 cell/pixel at a time -> dense output (more positions).
If S = 2, it moves 2 cells/pixels at a time -> smaller output (downsampling).
Bigger stride -> fewer kernel positions -> smaller \(H_{out}\), \(W_{out}\) and less computation.
Padding
Padding = adding extra border cells (usually zeros) around the input before applying the kernel.
Main purpose: control output size and preserve information at the edges of the image.
With \(P=0\) (“valid” conv): output shrinks because the kernel can’t go outside the input.
With \(P>0\) (often “same” conv when combined with \(S=1\)): output can keep similar spatial size, and border pixels influence more outputs.
If you use the common symmetric case (\(K_h=K_w=K\), \(P_h=P_w=P\), \(S_h=S_w=S\)), it’s the same formula applied to both \(H\) and \(W\)
Better and image
Input (7, 7)
After-padding (7, 7)
🖱️ Hover over the matrices to change kernel position.
Output (3, 3)
Between the “C” and the “NN”
Pooling layers (Max/Average Pooling)
Replaces each local window (e.g., \(2\times2\)) with one value
Max pooling: keeps the largest value
Average pooling: takes the mean
They reduce spatial size (\(H, W\)):
less computation
less overfitting
robustness to small shifts.
Pooling typically reduces \(H\) and \(W\), but keeps the number of channels\(K\) the same.
Example: with a \(2\times2\) window and stride \(2\), an input \((32,32,K)\) becomes \((16,16,K)\).
Pooling layer
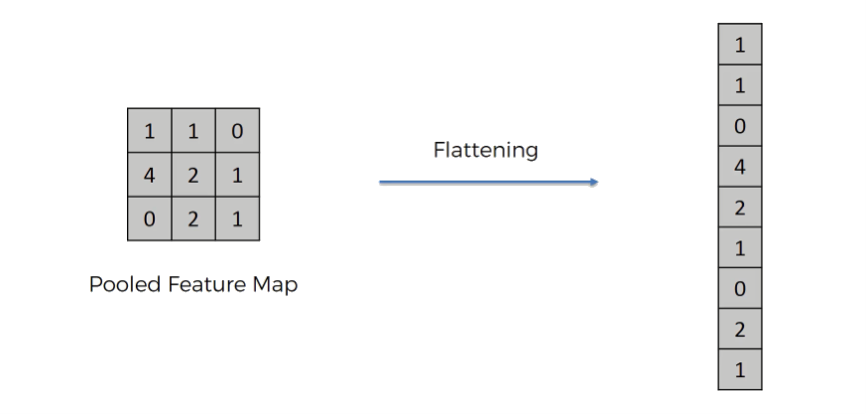
Flatten layer
Converts a multi-dimensional tensor into a 1D vector (per example), without changing the values.
Typical use: between convolution/pooling blocks and a fully connected (dense) layer.
Example shape change:
Input: \((H, W, K) = (8, 8, 32)\)
Output: \((8 \cdot 8 \cdot 32) = (2048)\)
Flatten has no learnable parameters — it’s just a reshape.
Flatten layer
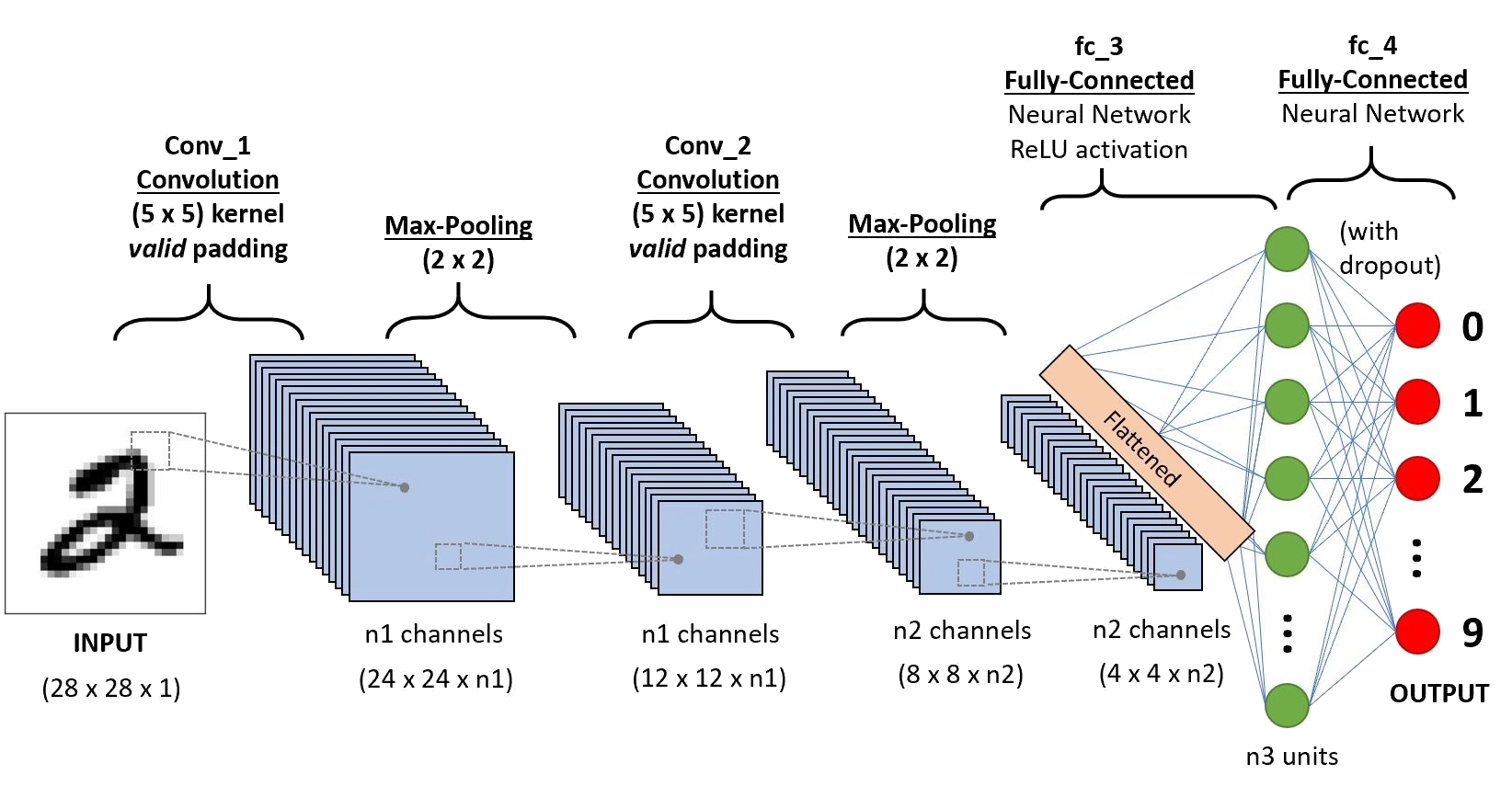
All together
“The” CNNs
AlexNet (ImageNet Contest 2012)
Winner of ImageNet Large Scale Visual Recognition Challenge (ILSVRC) 2012
ImageNet:
15+ million labeled high-resolution images
22000 categories ILVRC subset:
1000 images per category
1000 categories
1.2 million training images | 50000 validation images | 150000 testing images
AlexNet Task
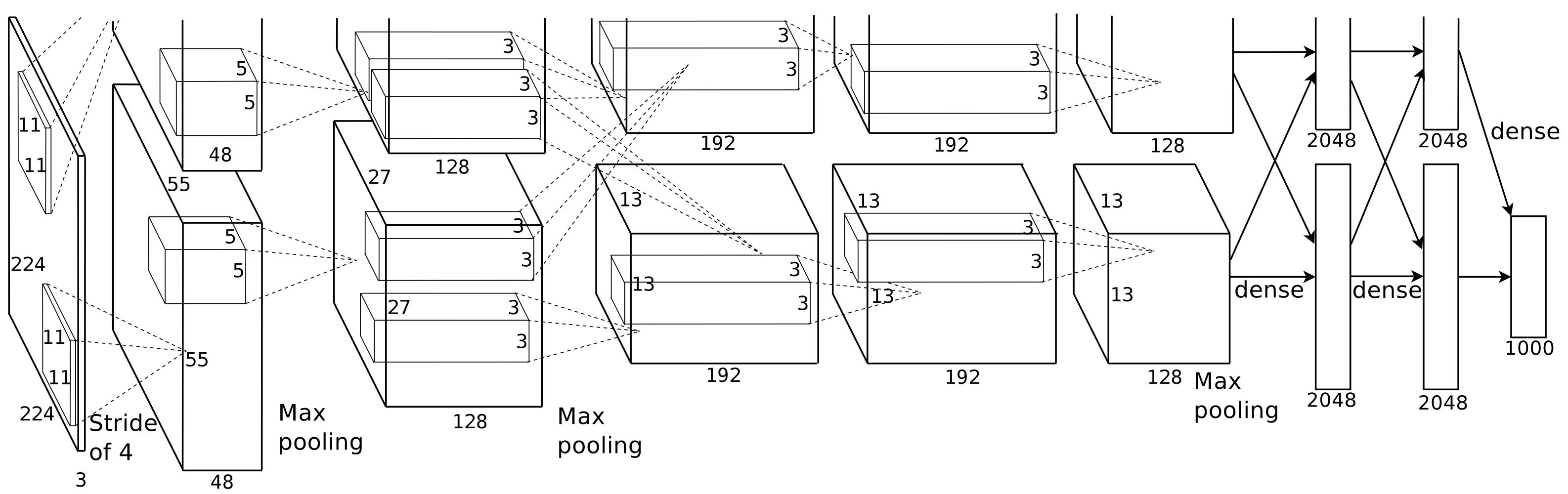
An illustration of the architecture of our CNN explicitly showing the delineation of responsibilities between the two GPUs. One GPU runs the layer-parts at the top of the figure while the other runs the layer-parts at the bottom. The GPUs communicate only at certain layers The network’s input is 150,528-dimensional, and the number of neurons in the network’s remaining layers is given by 253,440–186,624–64,896–64,896–43,264–4096–4096–1000.
AlexNet Task
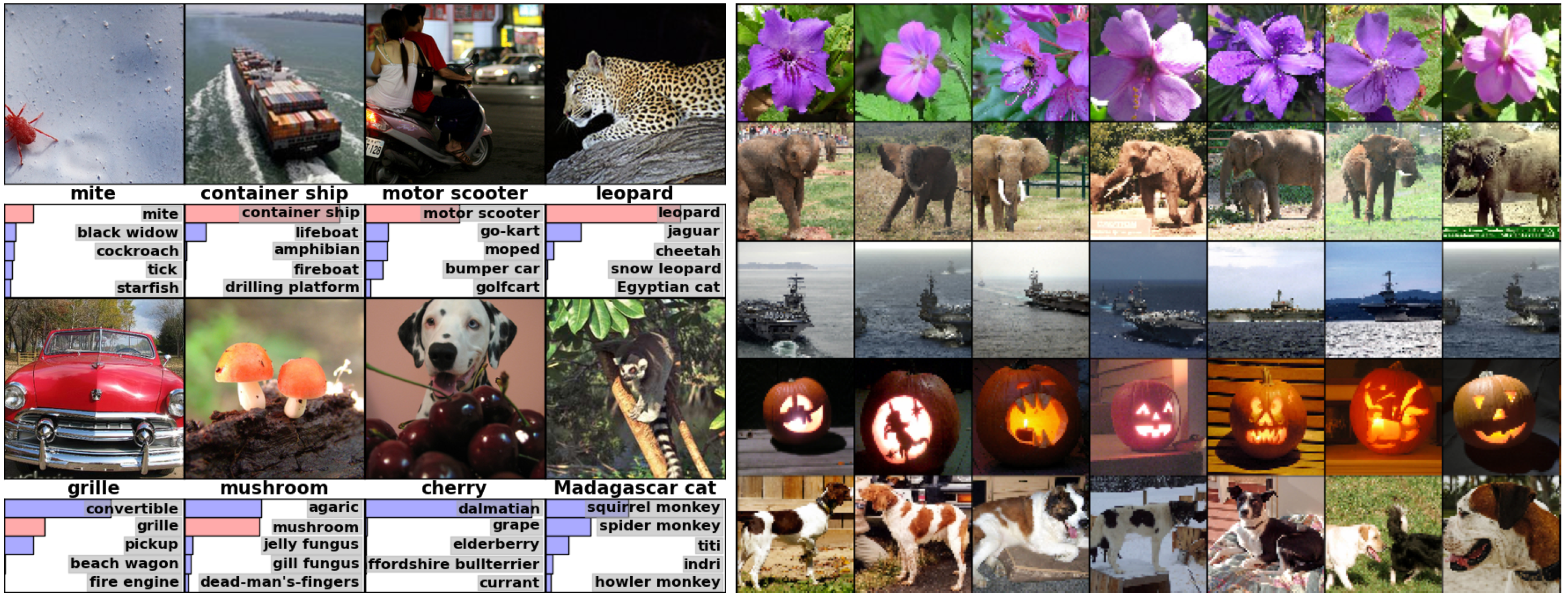
(Left) Eight ILSVRC-2010 test images and the five labels considered most probable by our model. The correct label is written under each image, and the probability assigned to the correct label is also shown with a red bar (if it happens to be in the top 5). (Right) Five ILSVRC-2010 test images in the first column The remaining columns show the six training images that produce feature vectors in the last hidden layer with the smallest Euclidean distance from the feature vector for the test image.
AlexNet kernels
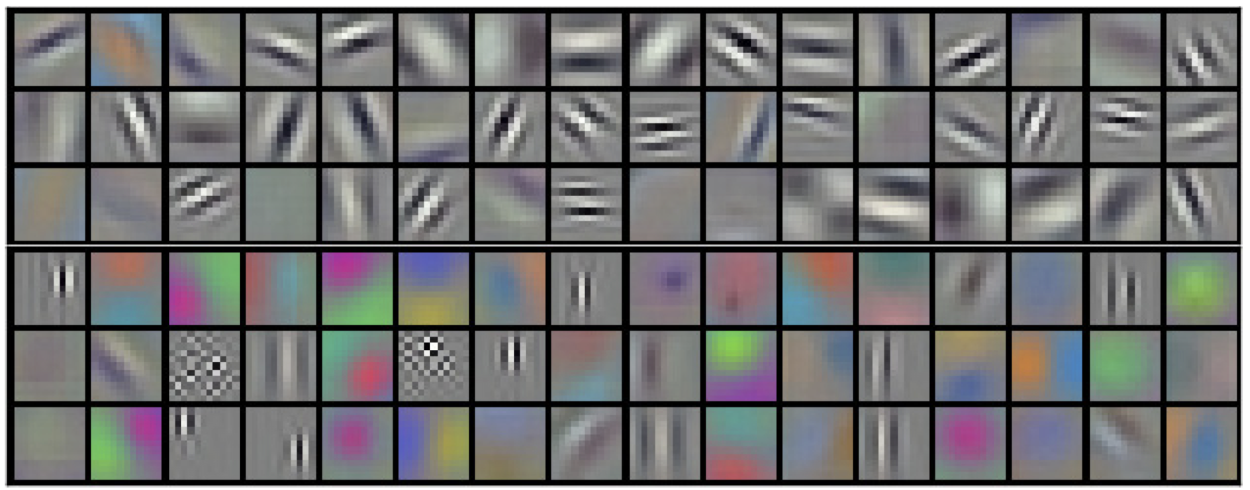
96 convolutional kernels of size 11×11×3 learned by the first convolutional layer on the 224×224×3 input images. The top 48 kernels were learned on GPU 1 while the bottom 48 kernels were learned on GPU 2
Local Response Normalization LRN
AlexNet introduced LRN to mimic a form of lateral inhibition (biological inspiration). The idea is to encourage competition between neighboring feature maps at the same spatial location.:
If several channels respond strongly at the same pixel, they suppress each other.
This makes the most strongly activated feature maps stand out.
Motivation in 2012 context:
ReLU activations can produce large responses.
LRN provided extra regularization/stabilization when training deep CNNs on ImageNet.
Local Response Normalization (LRN)
AlexNet used a LRN technique.
Given an activation \(a_{x,y}^i\) at position \((x,y)\) in channel \(i\), LRN outputs:
Viewing tissue structure under a light microscope shows strong contrast between nuclei vs cytoplasm/ECM so tissue architecture is easy to interpret.
Histopathology specifics: stain & color
Hematoxylin and eosin (H&E) staining accounts for over 80% of slides stained worldwide
Stain variability (H&E) causes domain shift
Common fixes:
color augmentation
stain normalization methods
multi-site training + validation
Avoid “too-clean” preprocessing that removes diagnostic cues
Histopathology specifics: stain & color inference
Histochemical staining of H&E is digitally transformed using a deep neural network into the special stains: (i) generation of JMS (purple arrow); (ii) generation of MT (Masson’s Trichrome, red arrow); (iii) generation of PAS (Periodic acid–Schiff, blue arrow).
Skip connections concatenate encoder features into the decoder at the same spatial scale.
Skip connections as multiscale feature fusion
Let the encoder feature map at level \(\ell\) be \(E_\ell \in \mathbb{R}^{H_\ell \times W_\ell \times C_\ell}\) and the decoder feature map before fusion be \(D_\ell \in \mathbb{R}^{H_\ell \times W_\ell \times C'_\ell}\).
Fuse via channel-wise concatenation: \[
F_\ell = \mathrm{Concat}\big(E_\ell,\ \tilde{D}_\ell\big)
\]
Then refine: \[
D_\ell = g_\ell(F_\ell)
\] where \(g_\ell(\cdot)\) denotes the conv block at level \(\ell\).
Concatenation preserves fine spatial cues in \(E_\ell\) while \(\tilde{D}_\ell\) carries semantic context from deeper layers, improving boundary localization (Ronneberger, Fischer, and Brox 2015a).
Pixelwise prediction + weighted loss for borders
For each pixel \(x\) and class \(k\), logits \(a_k(x)\) produce softmax probabilities: \[
p_k(x) = \frac{\exp(a_k(x))}{\sum_{k'=1}^{K}\exp(a_{k'}(x))}
\]
U-Net uses a weighted pixelwise cross-entropy to emphasize difficult regions (notably touching objects / borders): \[
\mathcal{L} = -\sum_{x\in\Omega} w(x)\,\log\big(p_{y(x)}(x)\big)
\] where \(y(x)\) is the ground-truth class at pixel \(x\), and \(w(x)\) is a precomputed weight map that upweights separation boundaries (Ronneberger, Fischer, and Brox 2015a, 2015b).
U-Net Training & inference details
Data augmentation: heavy geometric + photometric augmentation; elastic deformations are highlighted as especially effective for biomedical imagery (Ronneberger, Fischer, and Brox 2015a).
Valid vs. same padding: original U-Net uses valid convolutions, shrinking spatial size; output is produced for the central region of a larger input patch.
Inference on large images: tile the image, predict per tile, and blend overlaps to reduce boundary artifacts.
model “works” overall but fails on rare clinically important subtypes
Questions
References
Alipanahi, Babak, Andrew Delong, Matthew T. Weirauch, and Brendan J. Frey. 2015. “Predicting the Sequence Specificities of DNA- and RNA-Binding Proteins by Deep Learning.”Nature Biotechnology 33 (8): 831–38. https://doi.org/10.1038/nbt.3300.
Campanella, Gabriele, Michael G. Hanna, Lucian Geneslaw, Adrian Miraflor, Victor Werneck Krauss Silva, Klaus J. Busam, Edi Brogi, Victor E. Reuter, David S. Klimstra, and Thomas J. Fuchs. 2019. “Clinical-Grade Computational Pathology Using Weakly Supervised Deep Learning on Whole Slide Images.”Nature Medicine 25: 1301–9. https://doi.org/10.1038/s41591-019-0508-1.
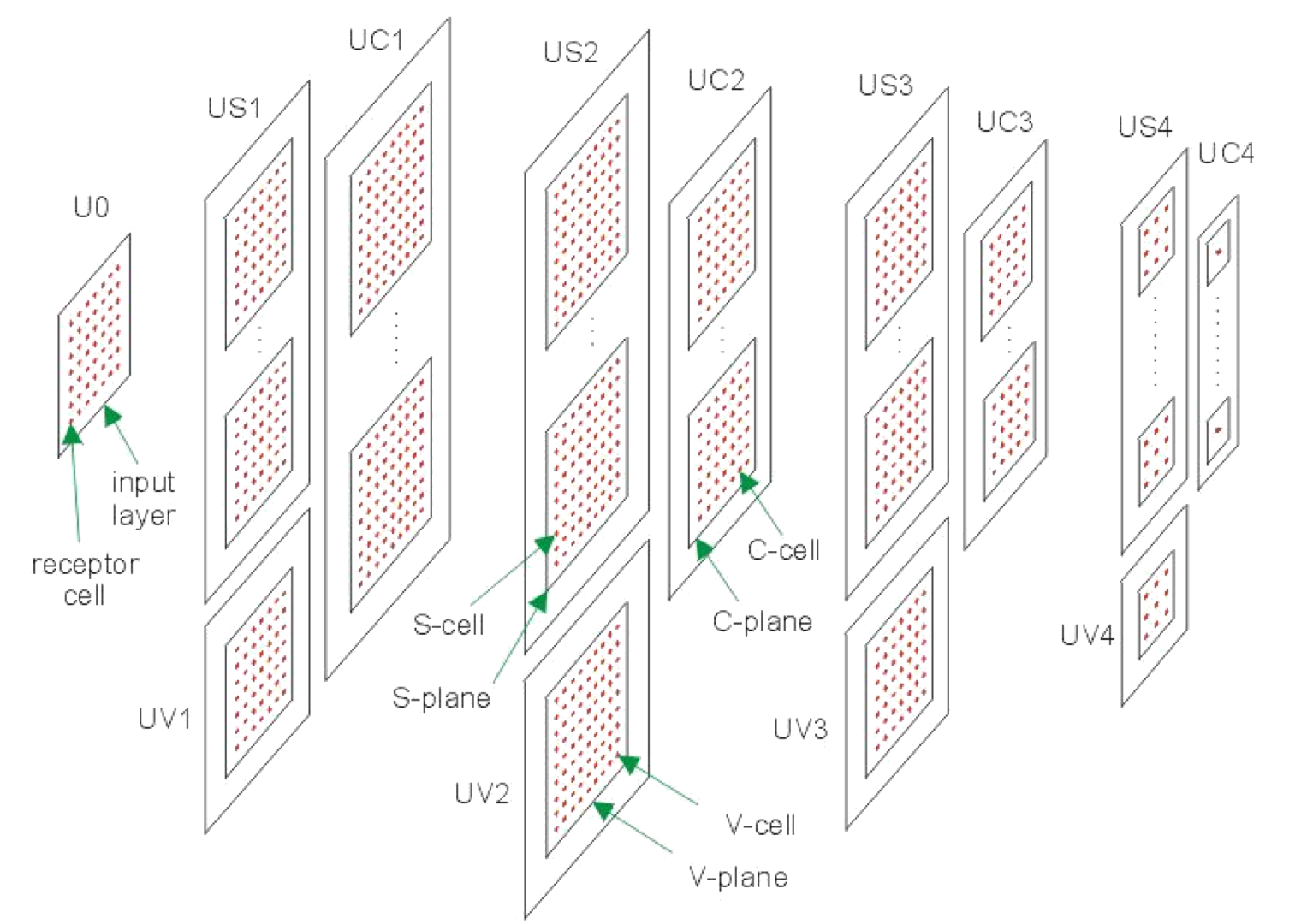
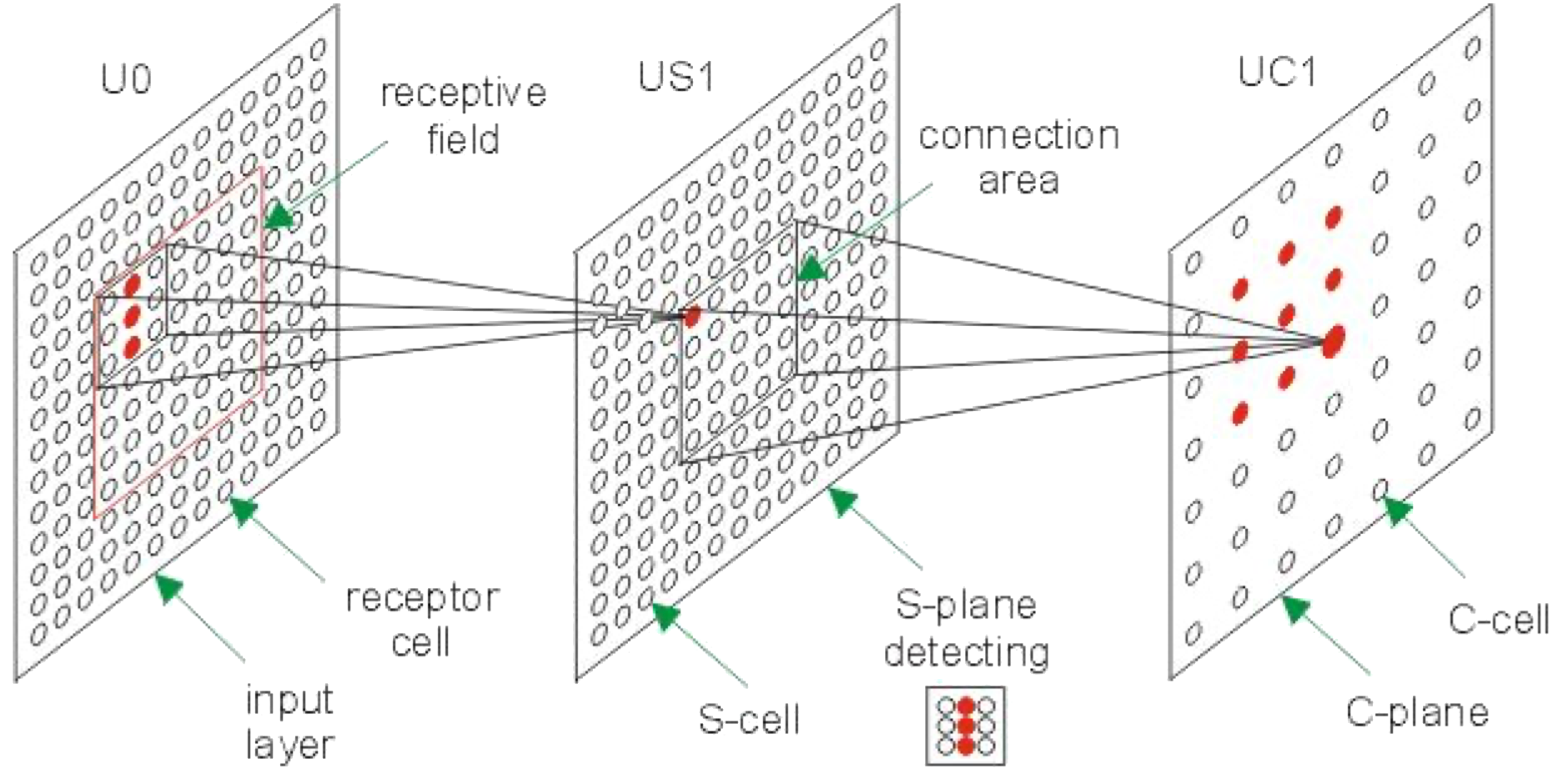
Fukushima, Kunihiko. 1980. “Neocognitron: A Self-Organizing Neural Network Model for a Mechanism of Pattern Recognition Unaffected by Shift in Position.”Biological Cybernetics 36 (4): 193–202. https://doi.org/10.1007/BF00344251.
Goodfellow, Ian, Yoshua Bengio, and Aaron Courville. 2016. Deep Learning. MIT Press.
Haan, Koen de, Yair Zhang, Joseph E. Zuckerman, Tianyu Liu, Ashley E. Sisk, MFP Diaz, Kun Y. Jen, et al. 2021. “Deep Learning-Based Transformation of h&e Stained Tissues into Special Stains.”Nature Communications 12 (1): 4884. https://doi.org/10.1038/s41467-021-25221-2.
He, Kaiming, Georgia Gkioxari, Piotr Dollár, and Ross Girshick. 2017. “Mask r-CNN.” In Proceedings of the IEEE International Conference on Computer Vision (ICCV), 2961–69. https://doi.org/10.1109/ICCV.2017.322.
He, Kaiming, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. 2016. “Deep Residual Learning for Image Recognition.” In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 770–78. https://doi.org/10.1109/CVPR.2016.90.
Ioffe, Sergey, and Christian Szegedy. 2015. “Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift.” In Proceedings of the 32nd International Conference on Machine Learning (ICML), 37:448–56. Proceedings of Machine Learning Research. PMLR. http://proceedings.mlr.press/v37/ioffe15.html.
LeCun, Yann, Bernhard Boser, John S. Denker, Donnie Henderson, Richard E. Howard, Wayne Hubbard, and Lawrence D. Jackel. 1989. “Backpropagation Applied to Handwritten Zip Code Recognition.”Neural Computation 1 (4): 541–51. https://doi.org/10.1162/neco.1989.1.4.541.
LeCun, Yann, Léon Bottou, Yoshua Bengio, and Patrick Haffner. 1998. “Gradient-Based Learning Applied to Document Recognition.” In Proceedings of the IEEE, 86:2278–2324. 11. IEEE. https://doi.org/10.1109/5.726791.
Ronneberger, Olaf, Philipp Fischer, and Thomas Brox. 2015a. “U-Net: Convolutional Networks for Biomedical Image Segmentation.”https://arxiv.org/abs/1505.04597.
———. 2015b. “U-Net: Convolutional Networks for Biomedical Image Segmentation.” In Medical Image Computing and Computer-Assisted Intervention – MICCAI 2015, edited by Nassir Navab, Joachim Hornegger, William M. Wells, and Alejandro F. Frangi, 9351:234–41. Lecture Notes in Computer Science. Springer, Cham. https://doi.org/10.1007/978-3-319-24574-4_28.
Simonyan, Karen, and Andrew Zisserman. 2015. “Very Deep Convolutional Networks for Large-Scale Image Recognition.” In International Conference on Learning Representations (ICLR). https://arxiv.org/abs/1409.1556.
Wang, Zijie J., Robert Turko, Omar Shaikh, Haekyu Park, Nilaksh Das, Fred Hohman, Minsuk Kahng, and Duen Horng Polo Chau. 2021. “CNN Explainer: Learning Convolutional Neural Networks with Interactive Visualization.”IEEE Transactions on Visualization and Computer Graphics 27 (2): 1396–406. https://doi.org/10.1109/tvcg.2020.3030418.
Zhou, Jian, and Olga G. Troyanskaya. 2015. “Predicting Effects of Noncoding Variants with Deep Learning–Based Sequence Model.”Nature Methods 12 (10): 931–34. https://doi.org/10.1038/nmeth.3547.